
25年专注于模具研发、设计、加工



联系我们


:压力控制在注塑精密成型领域中是很重要的环节,其中最重要的包含注射压力、锁模压力、保压压力和背压压力控制。针对全电动注塑机最重要的注射压力存在大延迟、大惯性、大扰动和非线性的特点,利用串级PID控制原理,提出了基于速度内环的压力闭环串级PID操控方法。该操控方法将与全电动注塑机螺杆相应环节的数学模型相结合,由PID控制器调节内环转速参数和外环注射压力参数,来保证输出注射压力的精准控制。实验根据结果得出,该控制方案效果好,具有响应速度快、精度及稳定度高、抗干扰能力强等优点,可满足全电动注塑机高速度、高精度及节能的
摘要:压力控制在注塑精密成型领域中是很重要的环节,其中最重要的包含注射压力、锁模压力、保压压力和背压压力控制。针对全电动注塑机最重要的注射压力存在大延迟、大惯性、大扰动和非线性的特点,利用串级PID控制原理,提出了基于速度内环的压力闭环串级PID操控方法。该操控方法将与全电动注塑机螺杆相应环节的数学模型相结合,由PID控制器调节内环转速参数和外环注射压力参数,来保证输出注射压力的精准控制。实验根据结果得出,该控制方案效果好,具有响应速度快、精度及稳定度高、抗干扰能力强等优点,可满足全电动注塑机高速度、高精度及节能的要求。
全电动注塑机对压力进行闭环控制是通过伺服单元驱动螺杆前进/后退而实现的,而对于伺服单元的控制,其输入指令有两种方式:转矩指令输入、速度指令输入。
在以转矩方式来进行压力调节的方案初步实验中,由于转矩与压力可以按力学公式导出其具有线性关系的物理模型,相应的PID控制算法较为简单。但是由于此压力闭环结构中不存在速度物理量,会导致在实际控制时,速度具有不可控性,从而使得压力的波动很大。
而以速度方式来进行压力调节的方案中,由于速度为控制输出量,可有效控制速度平稳性,从而可使得压力的控制较为平稳。因此,控制管理系统以控制电机转速的方式来进行压力调节。
另外,由于伺服驱动器的速度指令输入量是模拟量,必然存在一定的干扰与零漂,为此需在压力环中串入一个速度内环,以进行速度量的控制。
基于以上因素,全电动注塑机的压力闭环控制管理系统采用的方案为:基于速度内环的压力闭环串级PID控制。
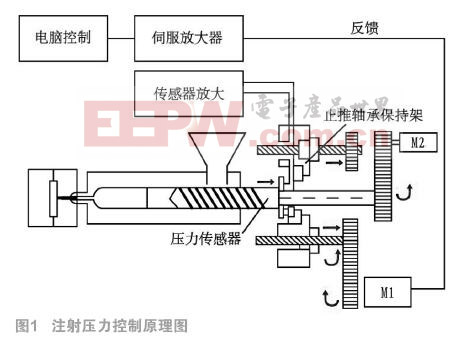
如图1所示为全电动注塑机注射压力控制原理图。对注射压力的控制,是在螺杆末端的止推轴承保持架上安装压力传感器,通过其反馈信号对注射压力进行精准的控制。用这种办法能够直接检测到注射或塑化时加料筒内树脂压力的反压力,因此能对注射压力(保压压力、背压压力)进行精准的控制,使设定的压力接近树脂的实际压力。
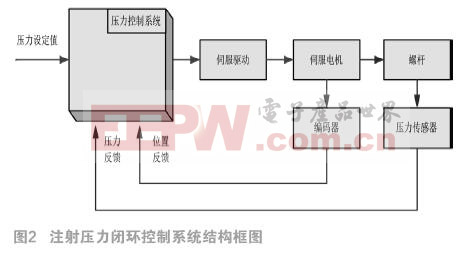
图2所示为注射压力闭环控制管理系统结构框图,其中输入信号:用户压力设定值;反馈信号:编码器位置反馈和压力反馈;执行元件:伺服驱动器和伺服电机。
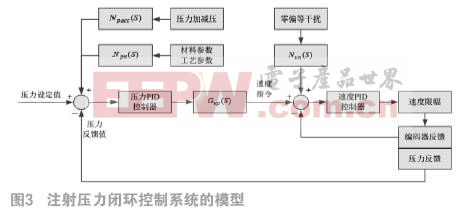
对于基于速度内环的压力闭环串级PID控制来说,确定图3中的相应传递函数对PID控制来说起着很重要的作用。图3中的相应传递函数说明如下:Gvp(S):速度调节量与压力增量的关系模型;Npacc(S):压力环的前馈补偿函数,压力按一定加速度进行变化;Npn(S):压力环的扰动传递函数;Nvn(S):速度环的扰动传递函数。
对于速度调节量与压力增量的关系模型Gvp(S),由于影响压力变化的因素有许多,如:树脂的流动性、不一样的温度/压力/体积下的树脂膨胀/压缩系数等等,要想根据物理学推导出一个准确的多变量的理论公式有很大的难度。
对于压力环的扰动函数Npn(S),其相应的影响因素包括:材料参数和加工工艺参数。
在保压过程中,保压的作用是维持很多压力以补充产品因冷却收缩的部分。而产品的冷却收缩会导致压力发送变化,其压力变化量则与树脂本身在不同模温不同压力的收缩系数和模腔结构相关,同时也与在不同加工工艺参数下产生的不同的开始保压时的压力/速度/位置有关。
在背压过程中,是通过螺杆旋转进料并保持一定的背压压力,使得料筒的树脂在一样体积和温度下保持均匀稳定的密度。而因螺杆旋转而导致的压力变化量则与螺杆的塑化能力、螺杆的转速、下料口下料均匀性相关。
故要想获得此扰动通道的理想函数模型将会很复杂,因此,要通过前馈补偿控制克服上述扰动对压力变化产生的影响将比较困难。
另外,由于采用的是经过控制电机转速实现压力调节的方案,并采用基于速度内环的压力闭环串级PID控制,因此,处于内环的速度环对伺服单元的速度响应时间要求比较高,否则将会对压力控制产生较大影响。
综合以上因素,不仅要通过实验寻求速度调节量与压力增量的关系模型Gvp(S),而且要通过优化压力闭环PID算法弥补压力环的扰动Npn(S),才能实现压力控制的稳定性、精确性、快速性。

如图4所示,设计速度调节量与压力增量的简易关系模型;首先使压力转化为扭矩,然后扭矩转化为速度,通过反复试验,确定简易关系模型的算法系数K1*K2,从而确定简易关系模型的函数
为避免控制作用过于频繁,消除由于频繁动作所引起的震荡,加入死区控制。其控制算法如下:
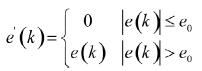
在偏差e(n)较大时,暂时取消积分作用;当偏差e(n)小于某个阈值时,才将积分项作用引入。其计算处理如下:
a、结合实际需要,设定一个阈值ε0;b、当e(n)ε时,采用PD控制;c、当e(n)≤ε时,采用PID控制或PI控制。
当积分控制量进入饱和区,将执行削弱积分项运算而停止进行增大积分项的运算,能够尽可能的防止控制量长时间停留在饱和区。其计算处理如下:
a、在计算u(k)时,先判断u(k-1)是否已超出控制量的限制范围;b、若在限幅范围内,则进行积分项的累加;c、若超上限,则只累加负偏差;若超下限,则只累加正偏差。
在PID控制中,微分信号的引入可改善系统的动态特性,但也易引进高频干扰,在误差扰动突变时尤其体现现出微分项的不足。通过将一个一阶惯性环节(低通滤波器)
通过对全电动注塑机注射压力测试,其中机型AE80-32的机械参数及机械设计规格如下:齿数丝杆:23;齿数电机:17;导程:16mm; 螺杆直径32mm; 额定转矩:160nm; 最大转矩:370nm; 最大注射压力:217 MPa; 得出注射动作过程曲线所示。
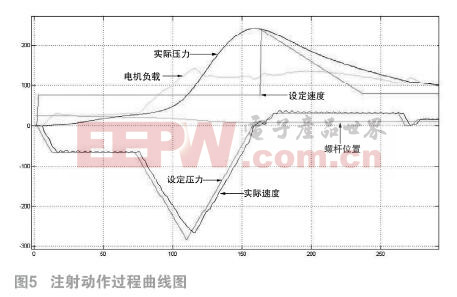
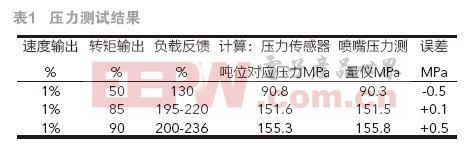
由测试结果可知,该方案不仅完全实现了全电动注塑机压力控制功能,而且压力性能得到了大幅度的提高,总体压力控制精度达到 ±0.5MPa。
整机联调实验表明,压力控制精度为±0.5MPa,满足了全电动注塑机性能要求。同时,广州数控全电动注塑机的研制成功并已投入实际的生产,打破了国外对全电动注塑机核心功能部件的垄断地位,填补了我国在该领域的空白,但是要达到国外高档产品的控制性能,还需要经过长时间的不断研究和持续改进。展望未来,随着我们国家塑料加工技术的成熟,该全电动注塑机将具有广泛的应用前景。
[1]向鹏,李绣峰.全电动式注射成型机控制管理系统设计[J].塑料,2007,36(2).
[3]李忠文,蒋文艺.精密注塑工艺与产品缺陷解决方案100例[J].化学工业出版社,2008.
[6]陈永亮.基于模糊 PID 控制的煤矿风量调节系统研究[D].武汉:武汉理工大学,2007.
本文来源于中国科技核心期刊《电子科技类产品世界》2016年第11期第71页,欢迎您写论文时引用,并标注明确出处。






